林业资源管理应用
三维激光点云和全景影像信息具有几何结构信息、纹理信息等丰富的特征,可以有效的表征场景内容,所以,基于三维激光点云和全景影像的场景理解可以更加准确、更加全面的理解场景内容信息。使用3D SLAM激光影像背包测绘机器人测出三维数据,基于此进行场景理解,以下是在林业资源方面的应用实例。
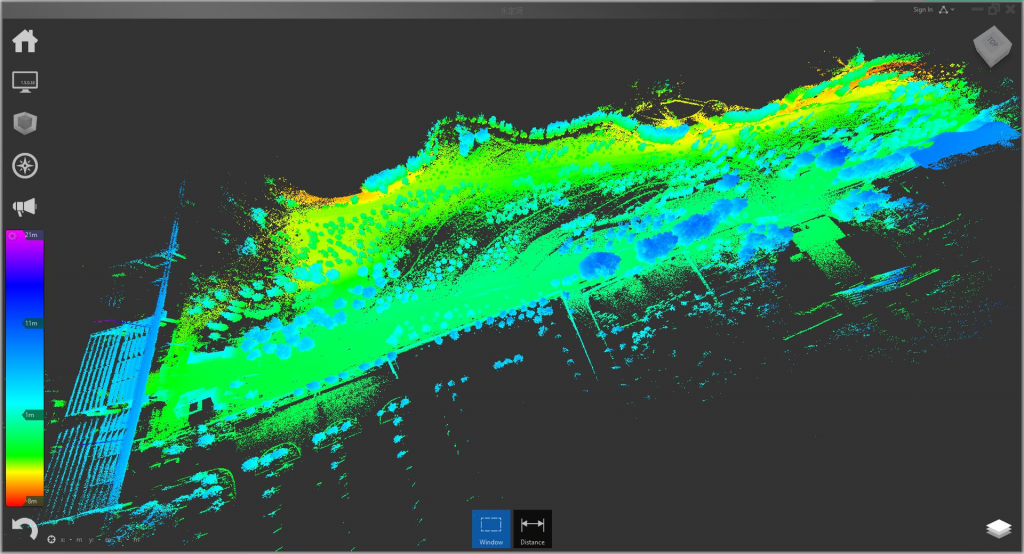
北京某两处山地公园,面积分别为360余亩和60余亩,现场采集分别用时40分钟和15分钟,经过处理,得到的点云数据如下:
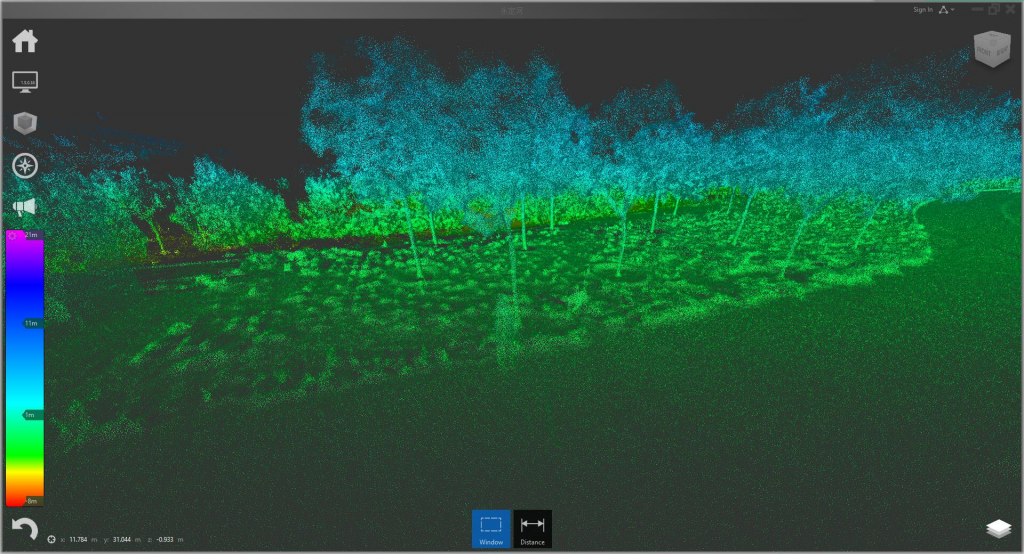
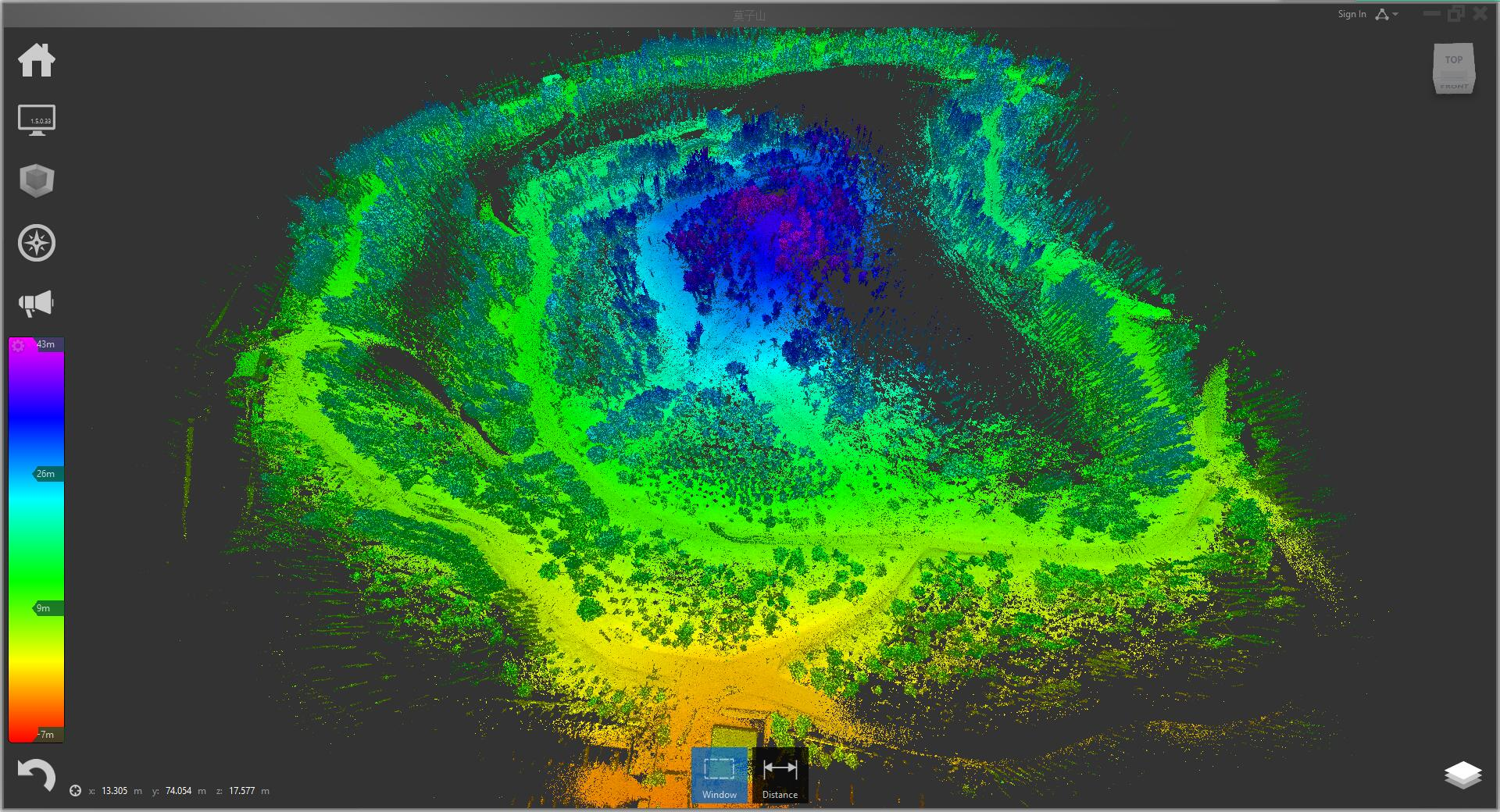
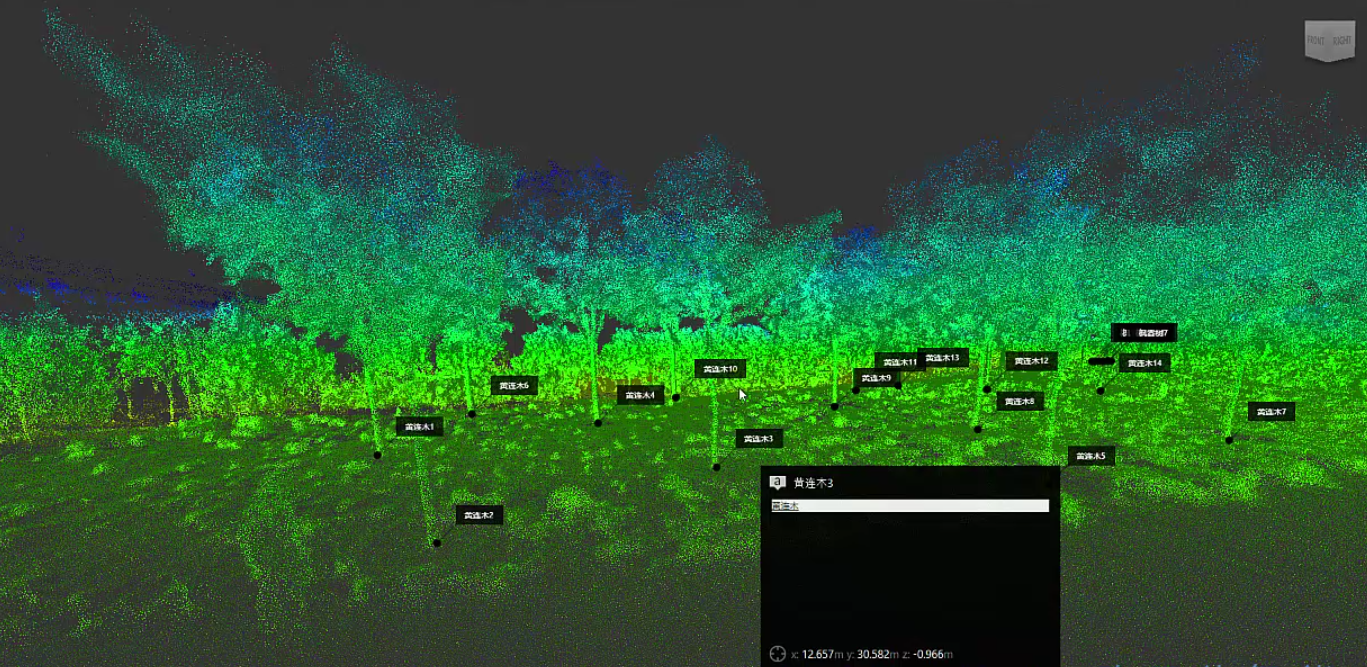
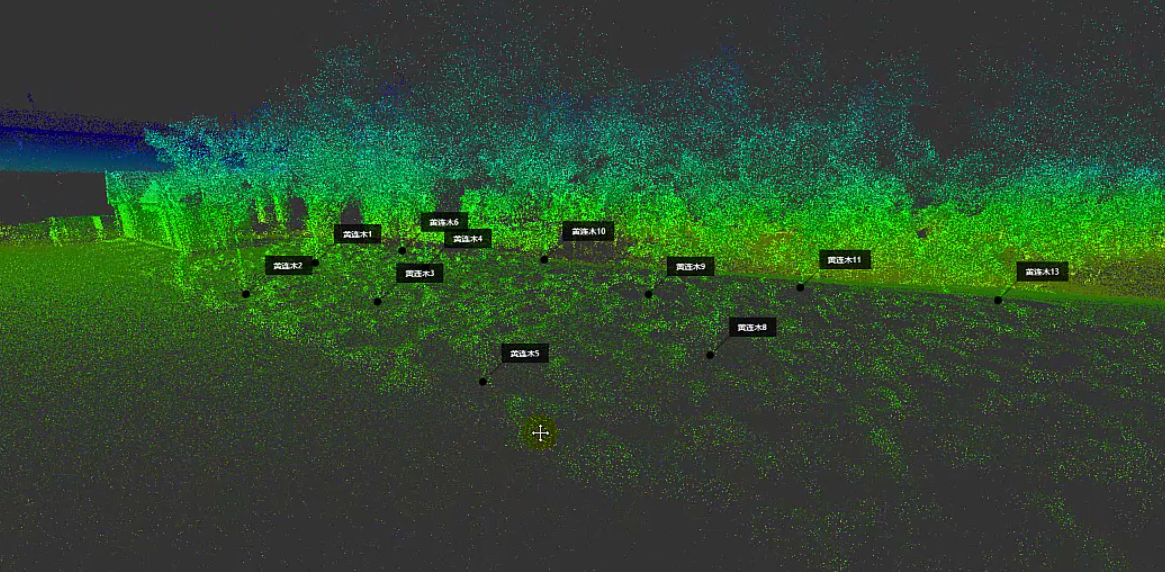
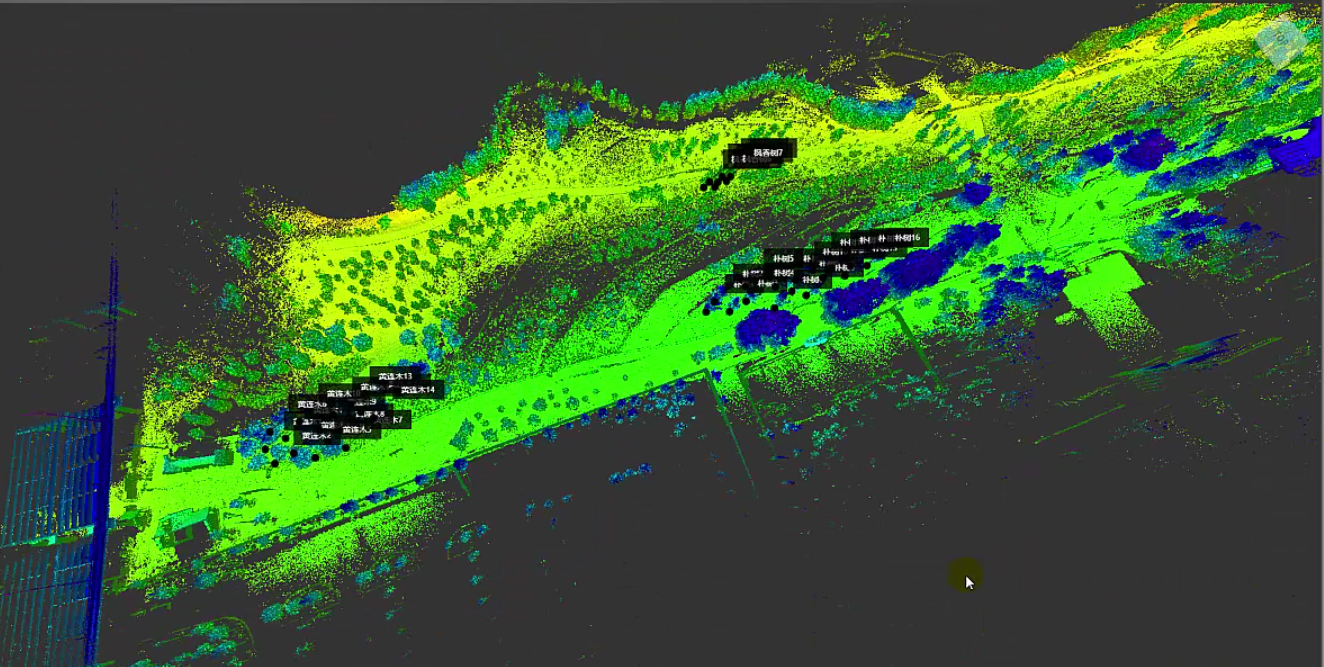
在得到点云数据之后,可以基于该数据对树木等林业资源进行识别和划分,如图所示: