

研究方向
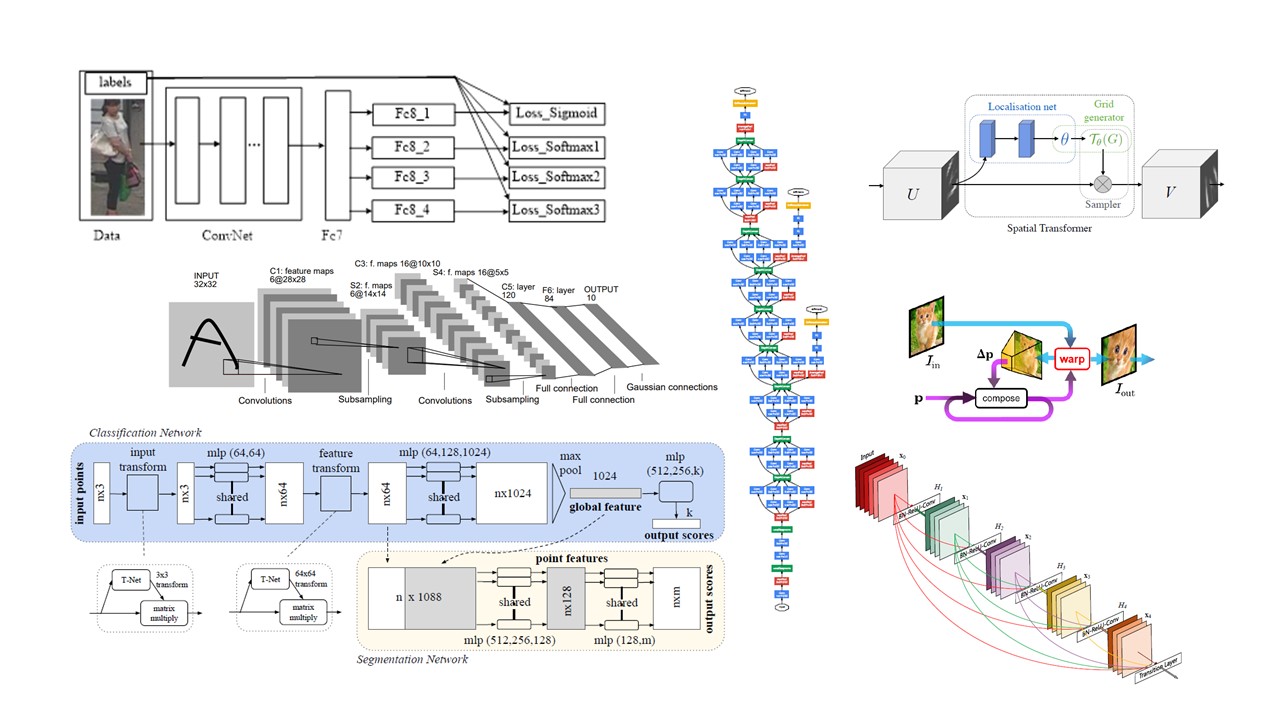
面向图像的多元化理解
面向图像的多元化理解的最终研究目标就是使计算机能象人那样通过视觉观察和理解世界,具有自主适应环境的能力。
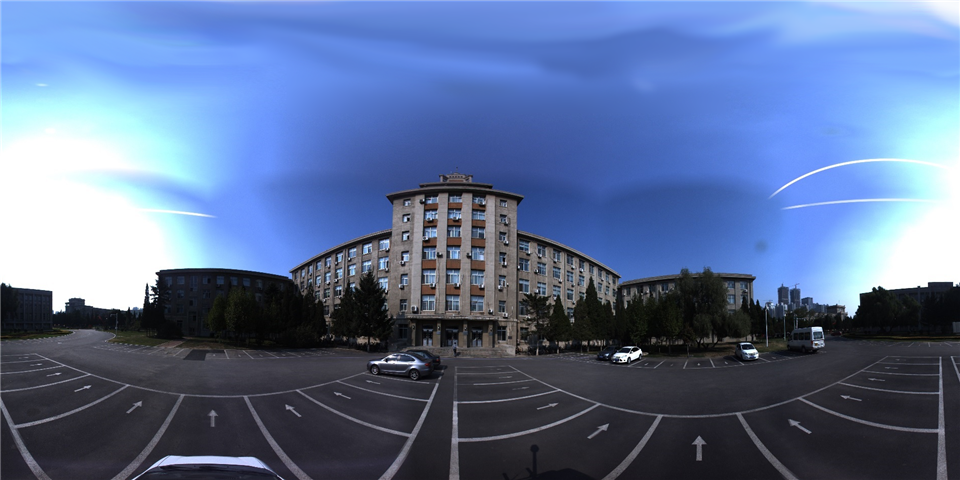
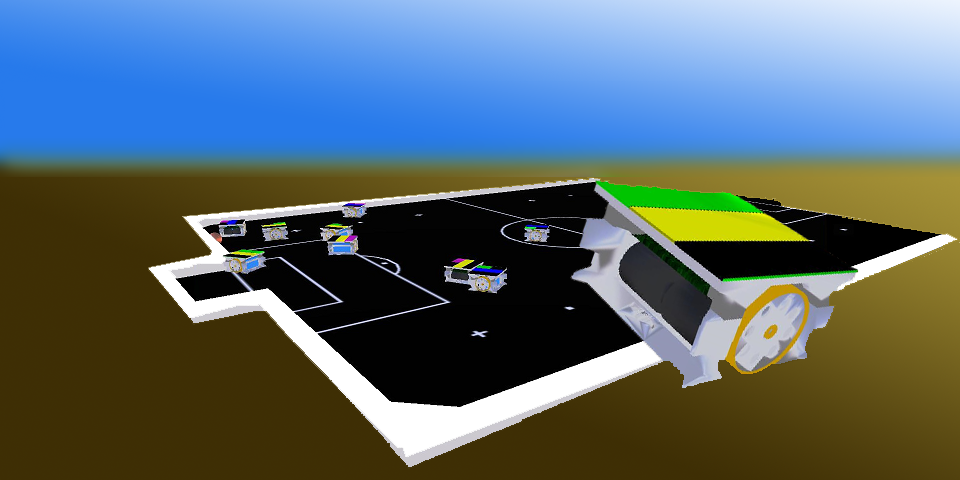
SLAM移动背包测绘机器人
SLAM移动背包测绘机器人实现了场景的点云和全景影像全覆盖,是新一代的场景数据智能采集平台。

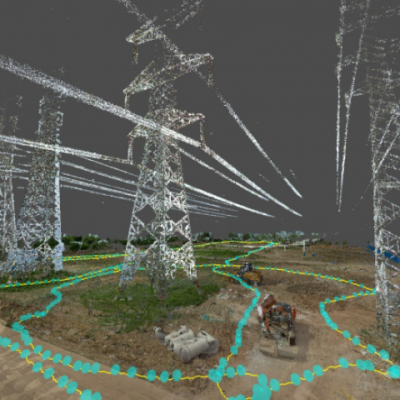
基于全景影像的三维重建
该项目是由国家自然科学基金资助的面上项目。三维重建的目的是从二维信息中恢复物体的三维几何结构,是Marr视觉理论的终极目标。
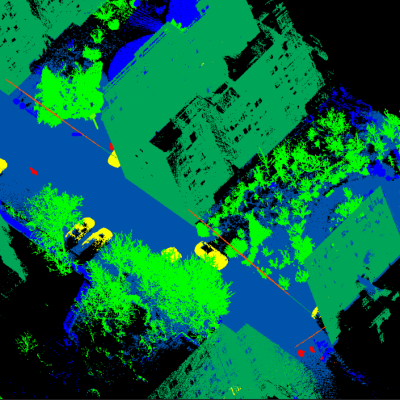
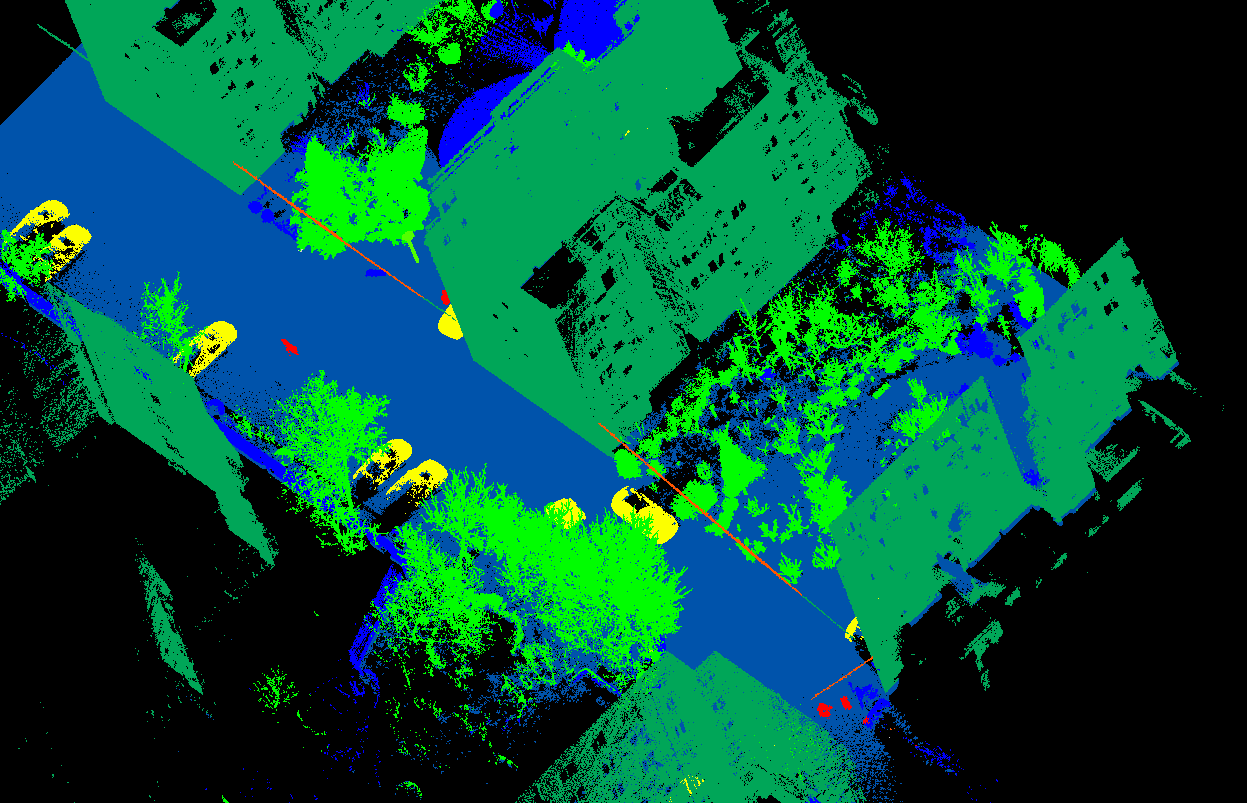
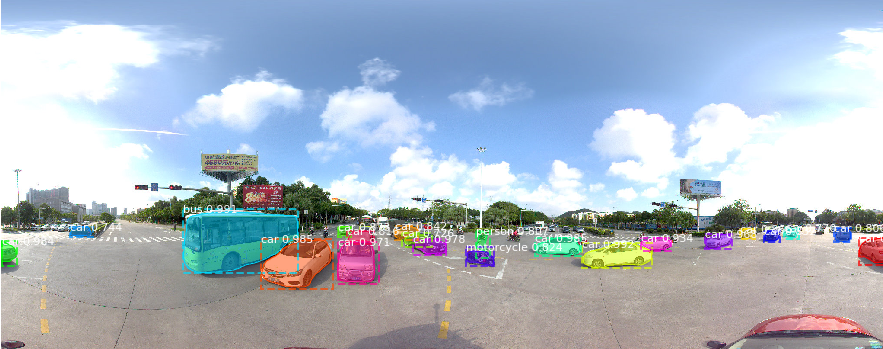
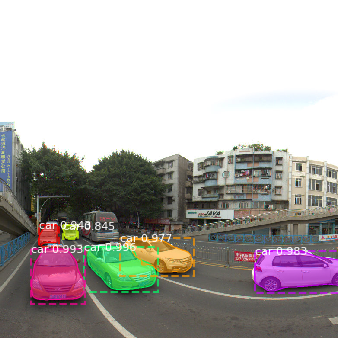
基于全景影像和激光点云融合数据的场景理解
场景理解是对场景中的内容进行解析,主要包含场景中的目标检测与识别、物体与物体之间的关系、场景语义分割、物体与场景之间的关系、场景分类、场景中物体位置与测量等内容。

东北大学牛牛实验室成立于1997年,是东北大学“985工程”人工智能与机器人实验室、机器人大学生创新基地、东大“牛牛”足球机器人研发基地。我们在研及完成的(包括国家自然科学基金内的)科研项目近20项,在领域内发表论文百余篇,其中有近40篇文章被国际权威的三大检索(SCI、EI、ISTP)收录。在读及毕业的研究生近80人。
了解更多

牛牛实验室的成员来自五湖四海,无论是烈风凄绝的草原边疆,还是清歌婉转的江南水乡,同样的是他们自强不息、敢为人先的作风,知行合一、行胜于言的学风。在牛牛实验室,他们挥洒汗水,分享喜悦,不负孜孜求学的岁月。
了解更多

“哒哒哒、哒哒哒”不仅是工作中键盘的敲击声,还可以是生活里快乐情绪的传递。牛牛实验室多姿多彩的活动给紧张的研究生生活带来更多色彩。
了解更多
近期动态
信息科学与工程学院2018年研究生暑期学术夏令营活动
教学科研办公室
第30届中国控制与决策会议在沈阳胜利召开
教学科研办公室
东北大学主办的英文刊《Journal of Control and Decision》被EI Compendex与Scopus收录
教学科研办公室
CCF YOCSEF(沈阳)高端论坛:如何应对智慧城市面临的安全挑战?
教学科研办公室
苏轼:古之成大事者,不惟有超世之才,必有坚韧不拔之志。