
全景实景数字城市项目
基于全景实景混杂现实技术的地理信息公共数据支撑平台优势在于:表达信息直观、可视化效果好、三维空间数据管理能力强等。为数字城市的建设提供直观生动的空间地理信息公共数据保障。
了解更多
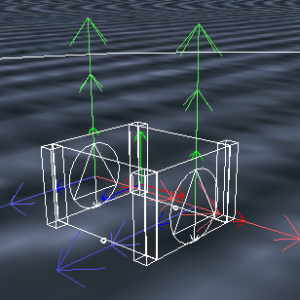


slam移动背包测绘机器人项目
3D SLAM激光背包测绘机器人是由全景相机、水平/倾斜激光雷达、控制器、WIFI和地磁信号采集模块以及电池等硬件设备高度集成在一起,可以背在人肩上的移动激光扫描测绘机器人。
了解更多
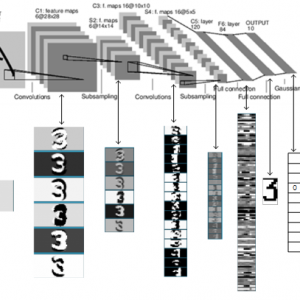
基于端到端的深度学习网络模型研究
深度学习使计算机视觉领域发展迅速,加快了该领域内的成果转化。基于端到端(end-to-end)的深度学习模型缩减了人工处理和后续处理,使模型具有更多的自我调节空间,增加了模型整体契合度。
了解更多

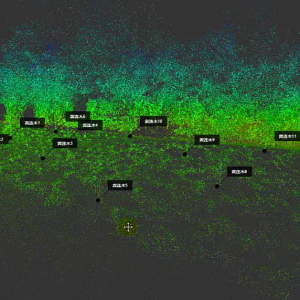
基于全景影像和激光点云融合数据的场景理解
场景理解是对场景中的内容进行解析,主要包含场景中的目标检测与识别、物体与物体之间的关系、场景语义分割、物体与场景之间的关系、场景分类、场景中物体位置与测量等内容。