项目介绍
3D SLAM激光背包测绘机器人是由全景相机、水平/倾斜激光雷达、控制器、WIFI和地磁信号采集模块以及电池等硬件设备高度集成在一起,可以背在人肩上的移动激光扫描测绘机器人。该机器人是基于3D SLAM技术的无依托环境建模移动机器人,主要用于无GPS信号覆盖或者GPS信号非常微弱的室内、地下等环境建模,精度高达1cm,在同行业处于国际领先地位。
该背负式测绘机器人可进行连续扫描,无需换站,多源数据采集并且全自动化处理,应用领域广泛并且采集非常方便,只需人背着机器人在环境中走一遍,不受上下楼梯等约束,只要人能走的地方均可对其所处周围环境进行高精度3D建模。同时,配备手持平板等移动设备,可以实时查看周围环境的3D点云模型,提供了快速、机动、灵活、高效的一体化三维高精地图移动测量的完整解决方案。
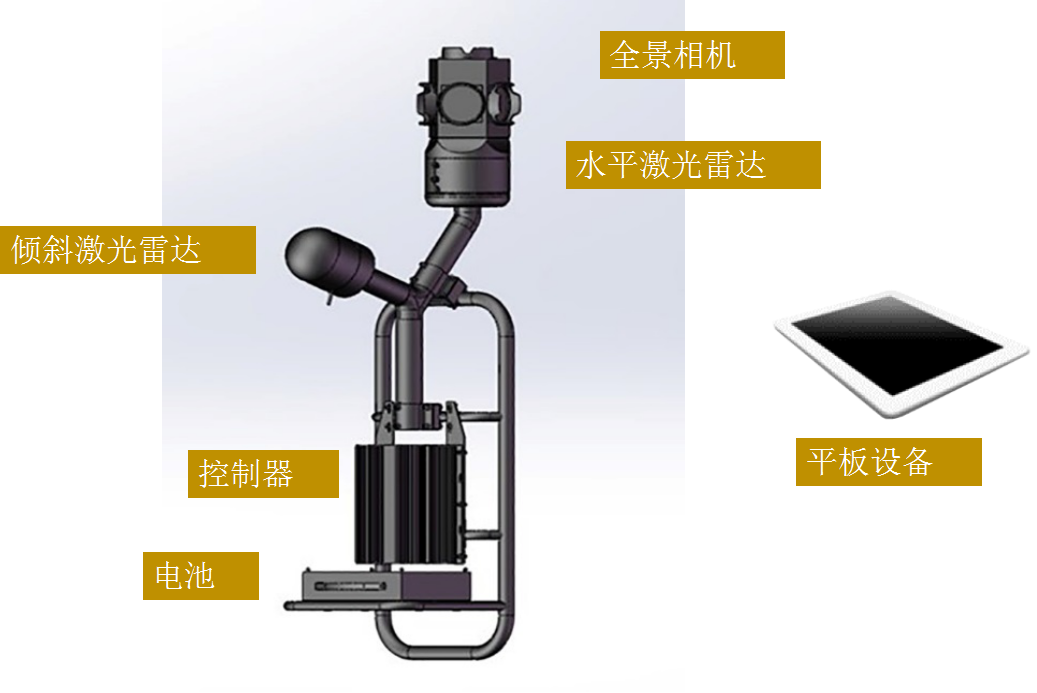
机器人结构图
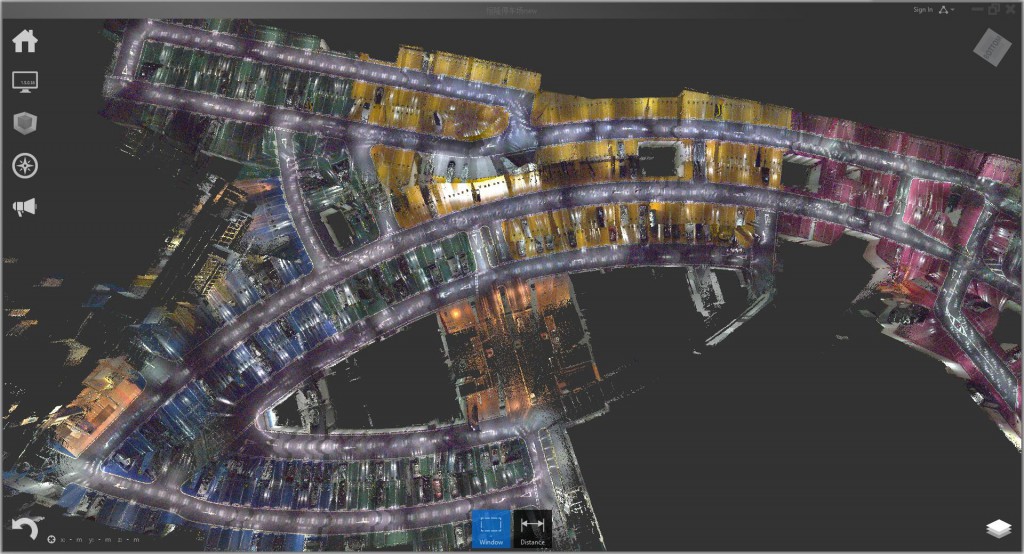
相比于车载激光雷达、静态激光雷达以及航拍激光雷达,该系统针对复杂的场景通过性好,不受铺装道路的行走限制,获取的点云数据更为完整,可以复现出场景中丰富的几何信息,更适合室外环境的场景理解,如图所示。
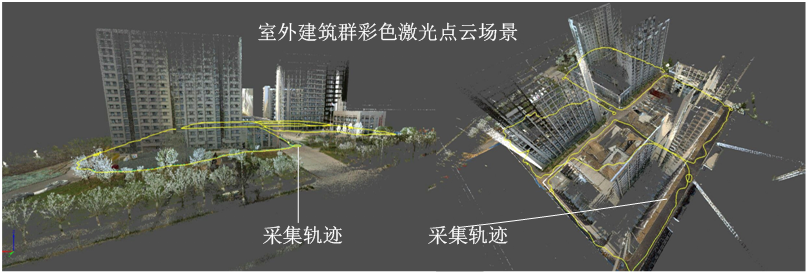
室外建筑群彩色激光点云与数据采集轨迹
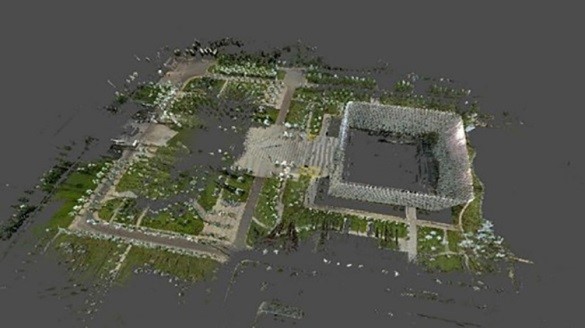
大学校园的三维点云模型
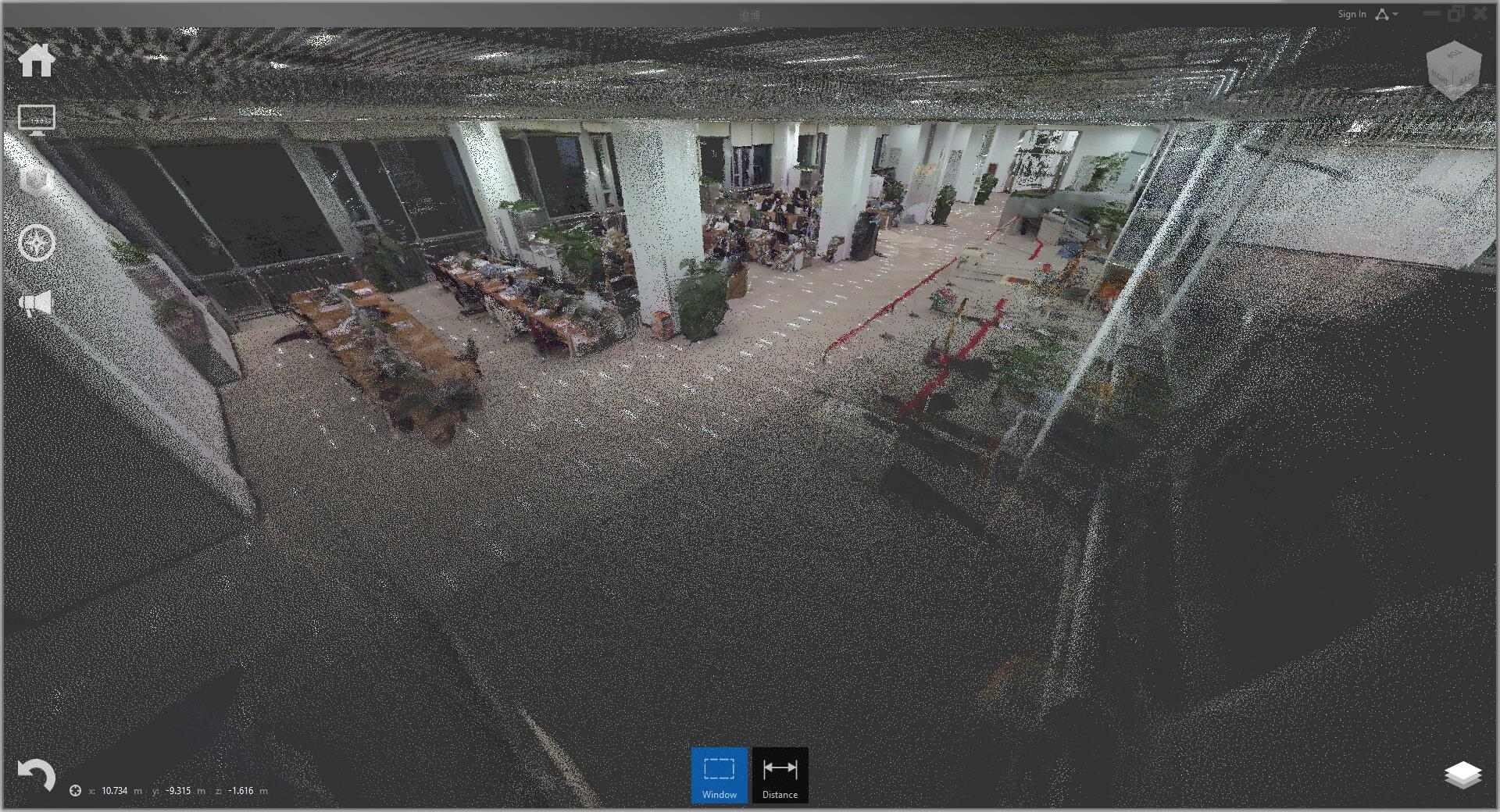
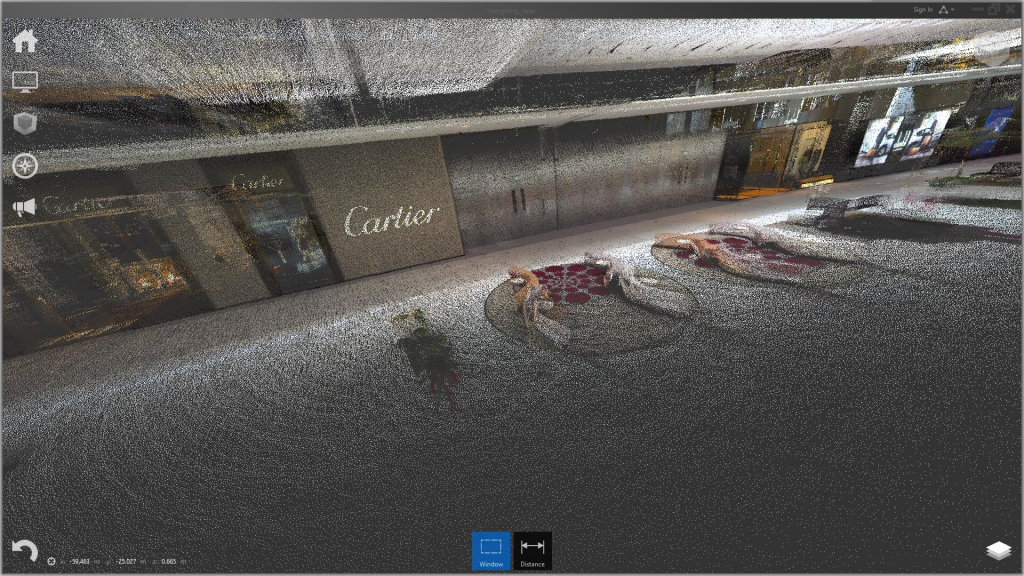
背负式全景影像和激光点云数据采集系统可以实时生成点云数据,每移动固定距离获取一个球形全景影像,如图所示,球形全景影像提供了该段场景的图像数据。该系统实现了全景影像和激光点云的高精度配准。彩色激光点云数据具有空间信息(x,y,z)、颜色信息(R,G,B)以及强度信息(I)。场景中的每个彩色点云都存在一个球形全景影像与之对应。背负式全景影像和激光点云数据采集系统实现了场景的点云和全景影像全覆盖,是新一代的场景数据智能采集平台。
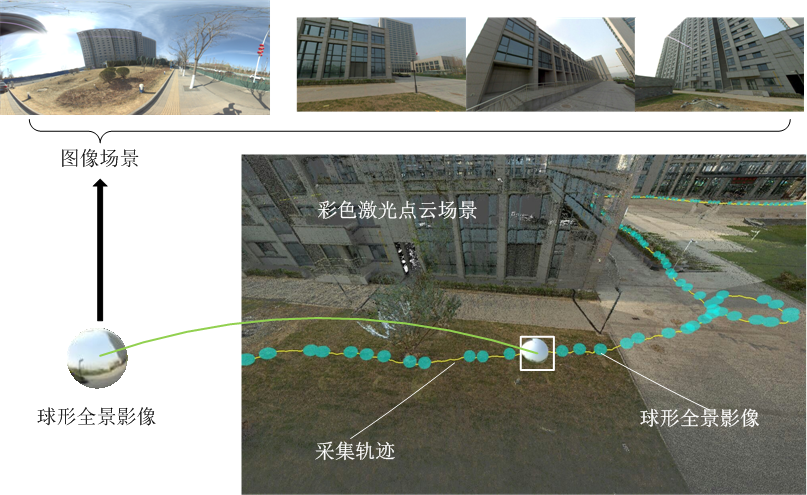
基于全景影像与激光点云融合数据的室外场景
成果示意图: