技术特点
3D SLAM激光背包测绘机器人是一个背负式系统,当工作人员背负作业时,激光扫描仪的运动轨迹是一条与工作人员行走的步态有关的非线性和高动态的曲线。按照一般的理解,激光扫描仪如果安装在移动测量系统中,一定要有一个高精度的定位系统(POS系统)与之匹配,这样,激光扫描仪得到的激光点才能得到对应的位置和姿态数据,进而合成三维的激光点云。同时,常规的移动测量系统的载具在室外一般是汽车,而汽车由于采用四轮结构的底盘,因而其转弯半径受限,所以它的行驶轨迹往往是局部连续可微的平滑曲线。而同样是基于激光的移动测量系统,3D SLAM激光背包测绘机器人既没有GPS,也没有IMU惯导,在如此高动态非线性的运动采集方式下,却能获得非常高精度的三维空间点云成果,就非常让人不解了。
这种不解很正常,主要是源于对3D SLAM激光背包测绘机器人的工作原理的不清楚不了解。在此解释一下为什么3D SLAM激光背包测绘机器人是可以高动态的运动中采集数据并高精度建模的。
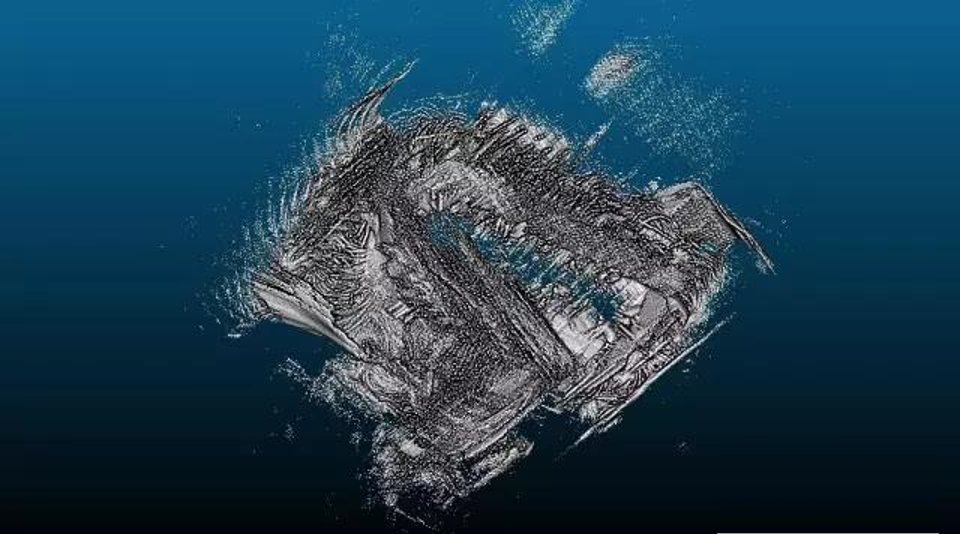
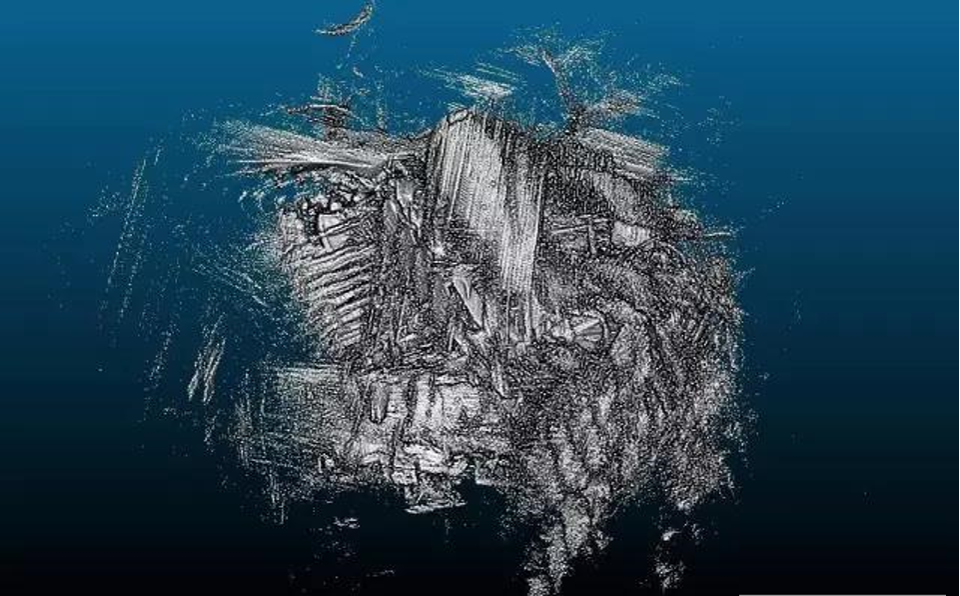
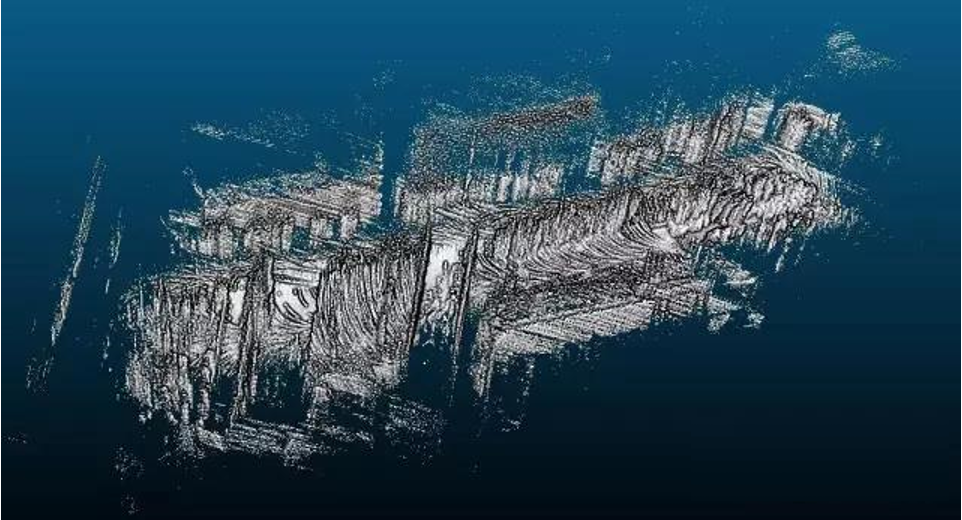
首先看一下原始的采集得到的激光传感器数据的样子,可以看到原始的激光数据漫天飞舞杂乱无章。
而对应的激光传感器的轨迹呢?是一条不规则的动态轨迹(如下图)。
下面再看一个采集数据的现场图片,理解一下3D SLAM激光背包测绘机器人作业时系统的高动态非线性工况特点。

外业人员背负着激光背包测绘机器人,上下楼梯,行动自由,采集数据的作业方式基本上已经没有了地面上一般走行线路的物理限制。
事实上,为了能解算出激光点云数据的高动态非线性位姿,我们研究了激光点云的处理算法,从这些杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算机器人的位置和姿态。
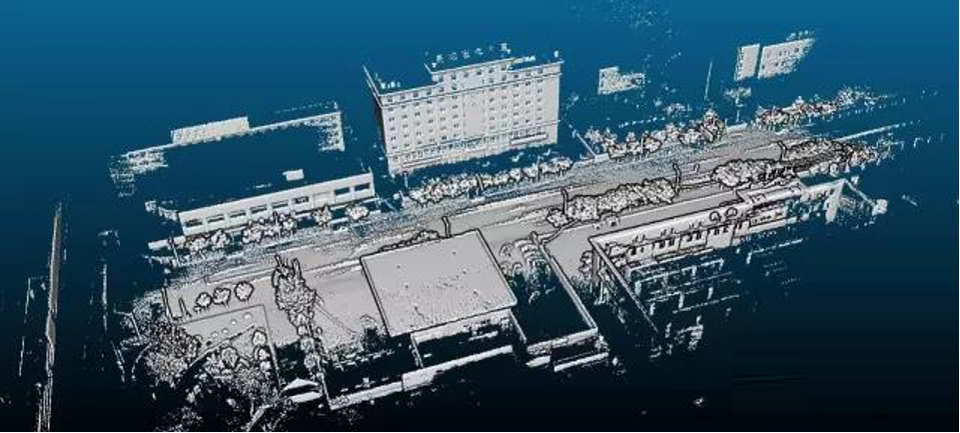
经过算法处理后,漫天飞舞杂乱无章的原始激光点云数据好像变得听话了,“它们”乖乖地站站队,规矩地拉拉手,重新排列队形,立时,精彩的三维世界被瞬间凝固下来。
下面是几组处理前后的激光点云对照结果。
处理前(对比1)
处理后(对比1)

处理前(对比2)
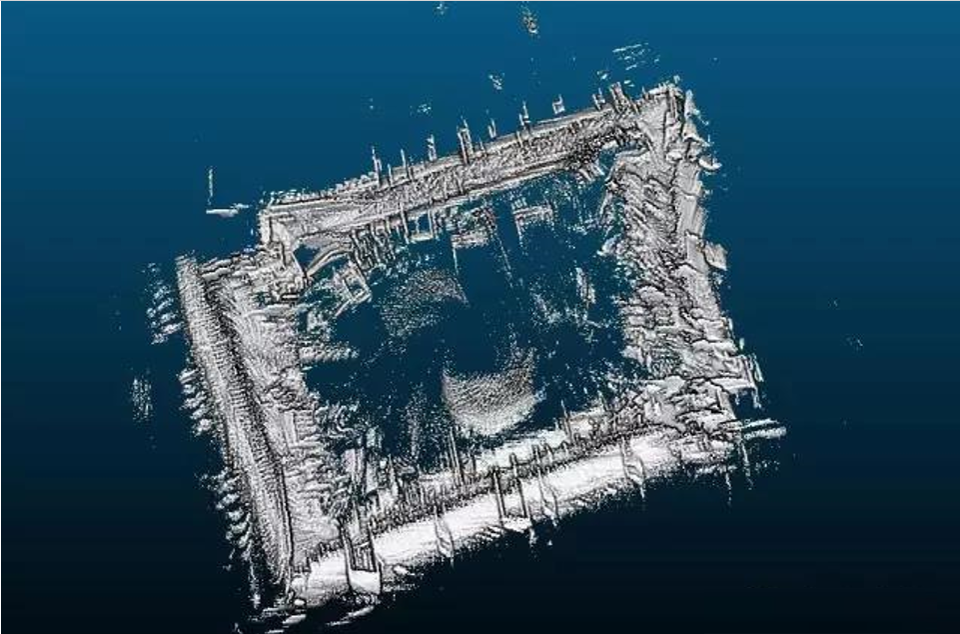
处理后(对比2)

处理前(对比3)
处理后(对比3)