在建筑工程项目中的应用示例
3D SLAM激光影像背包测绘机器人的特点包括高速的现场数据采集、高精度的数据处理和点云建模、POS自定位核心算法不依赖GPS信号和惯导的约束、室内/室外/地下/地上三维空间全地形作业等。
这些特性非常适合建筑工程施工行业的构数据每日动态数据采集、项目施工全过程结电子档案生成、工程现场物资堆放空间规划与管理、工程质量实时管控等BIM应用。
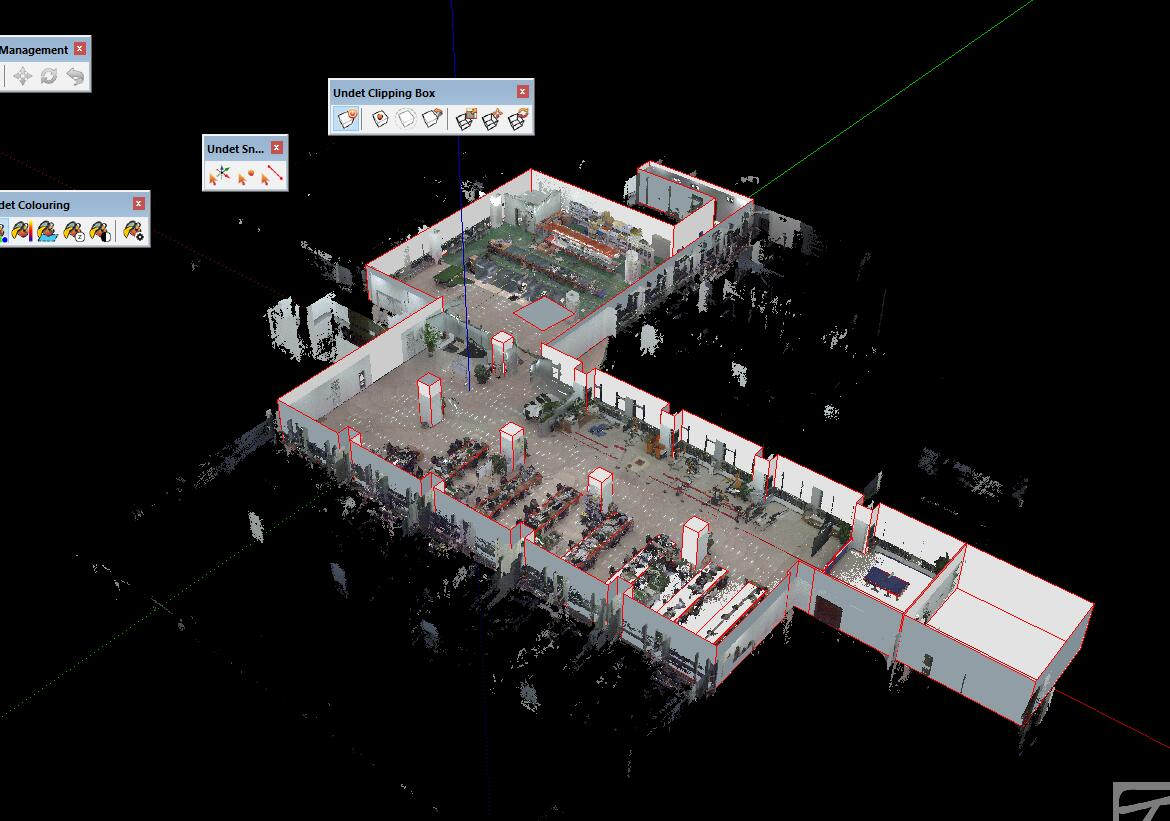
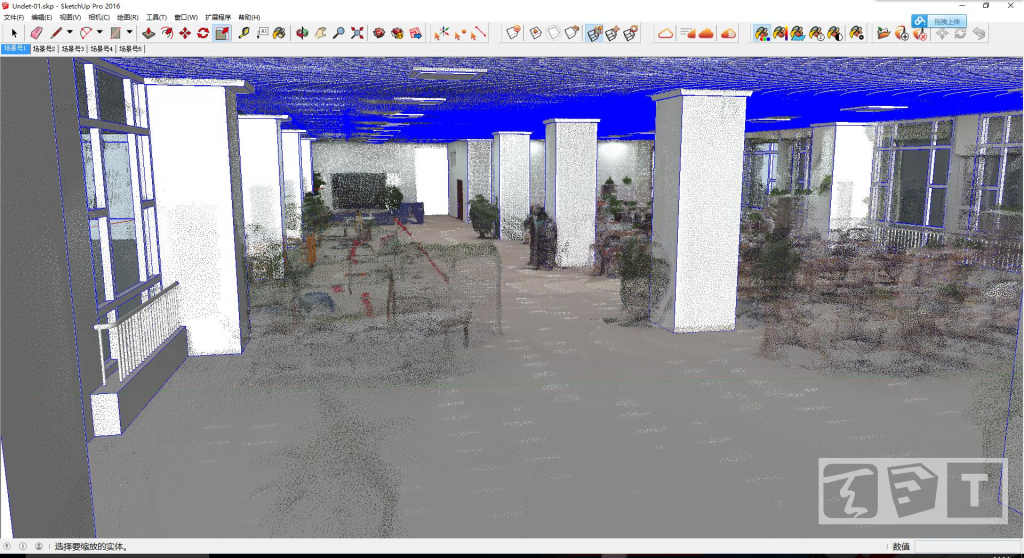
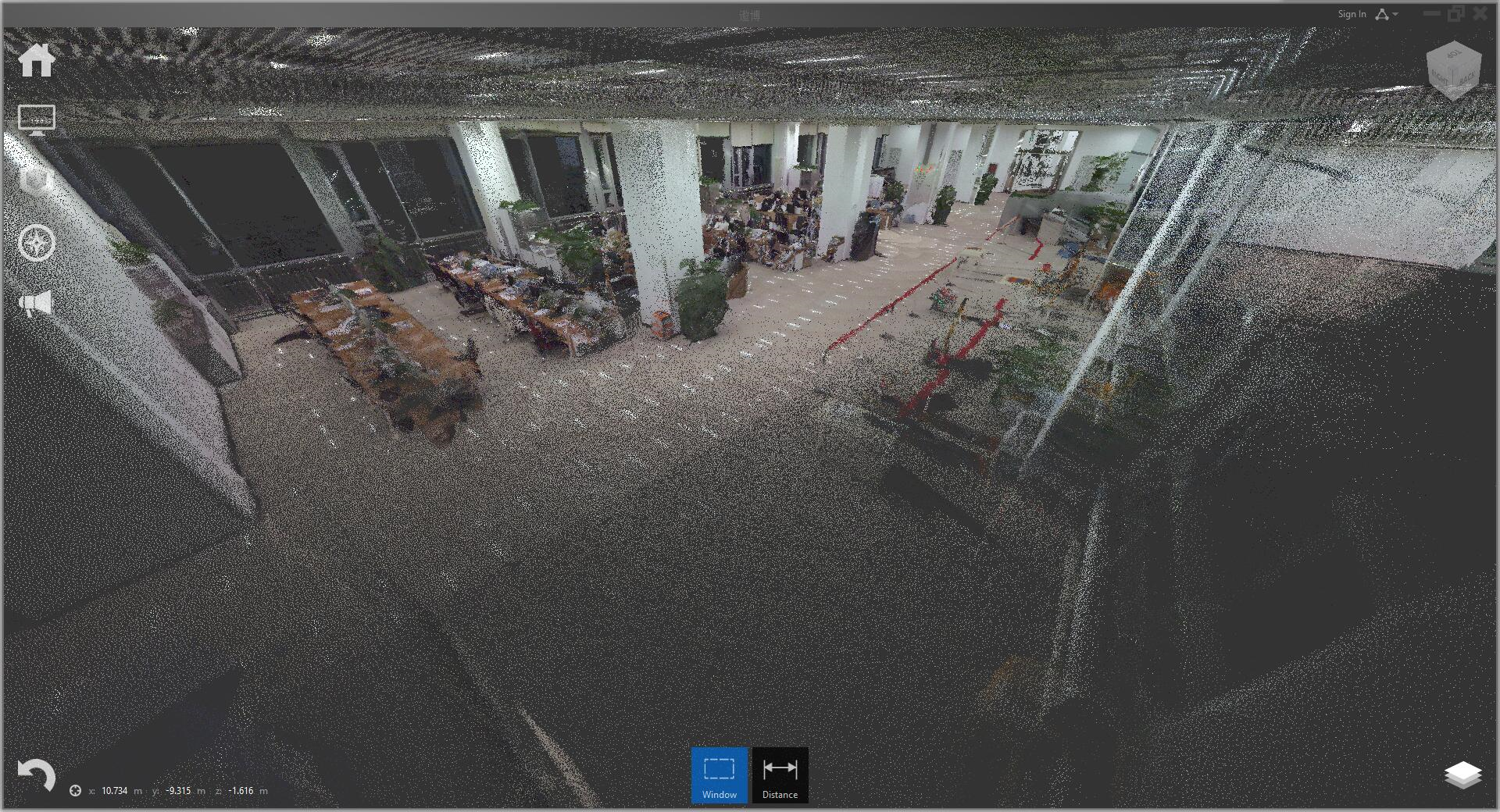
某公司办公楼层,面积约2500平方米,用时3分钟数据采集完毕,得到原始着色点云数据如下:

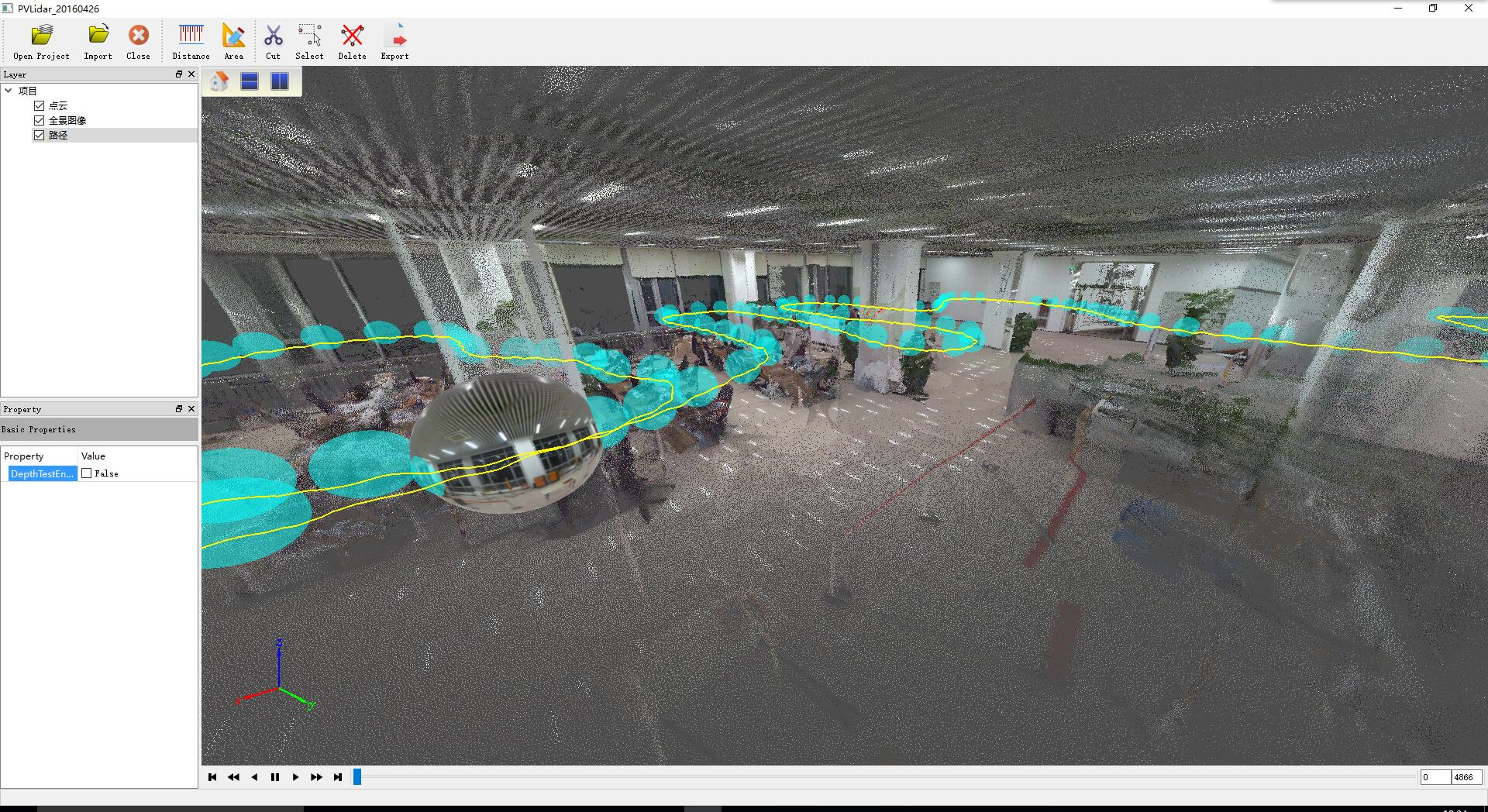
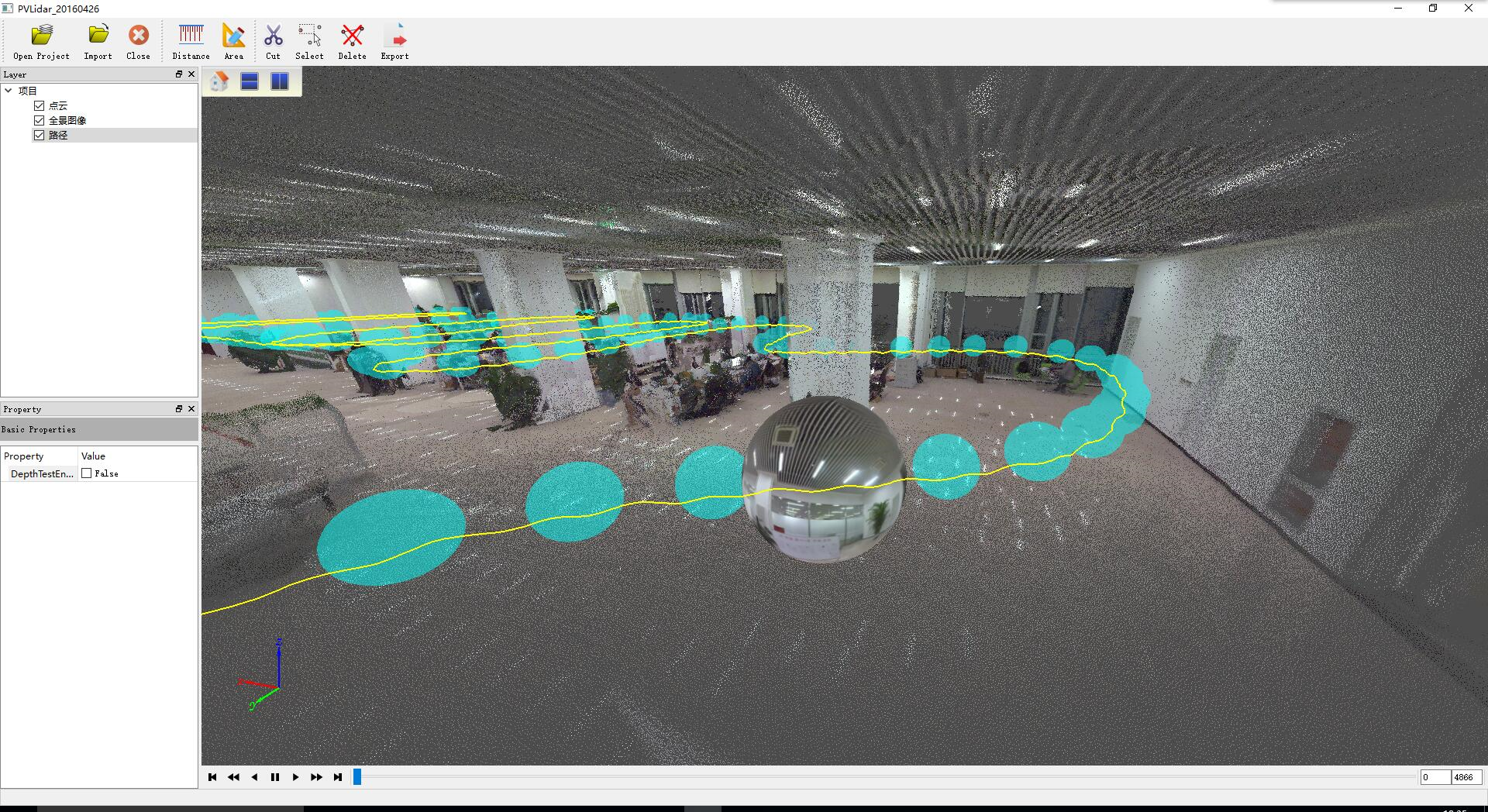
点云模型和影像数据叠加:
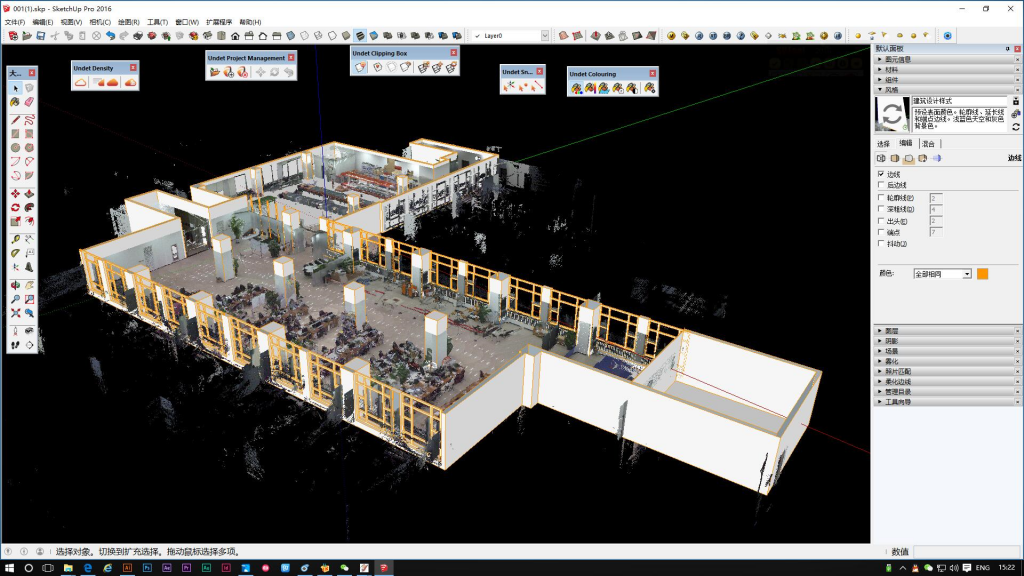
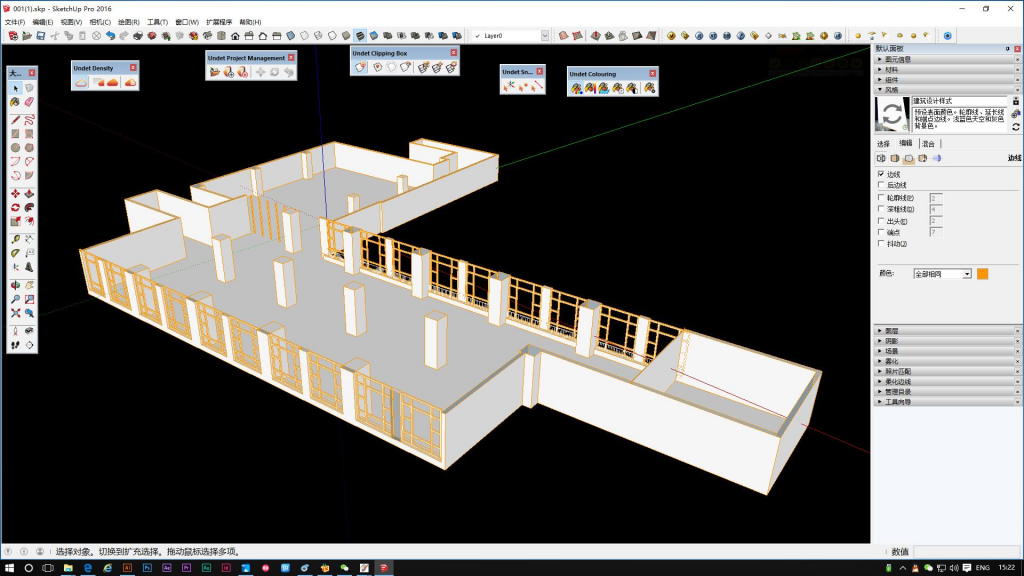
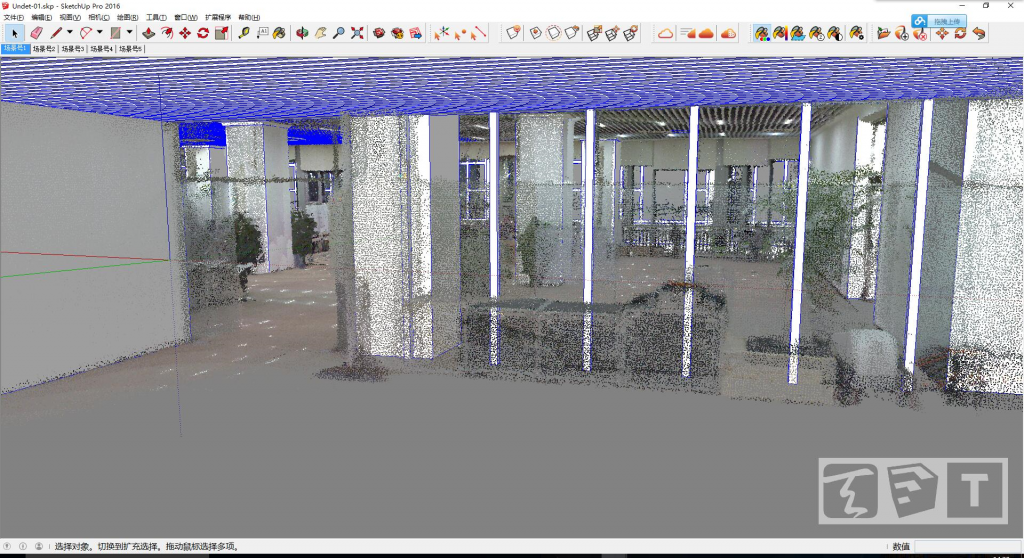
基于得到的室内三维点云数据,就可以在三维建模软件SketchUp中快速进行三维建模,如下图: