跨平台机器人仿真开发环境
跨平台机器人仿真开发环境
ROS简介
2007年,ROS(机器人操作系统,Robot Operating System)最初由斯坦福人工智能实验室的Switchyard为了支持斯坦福人工智能机器人(STAIR)项目而开发的。2008年,ROS的主要由Willow Garage公司继续维护开发,Willow Garage是一家机器人技术研究机构和机器人技术孵化基地。
ROS是专为机器人软件开发所设计出来的一套操作系统框架,它能够支持多种机器人构型和传感器。ROS是一个开源的操作系统,包括硬件抽象描述、底层驱动程序管理、公用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。ROS能够提高机器人研发的代码复用率,集成与其他机器人软件框架。
ROS目前仅支持在Ubuntu Linux操作系统环境中运行,ROS和传统的桌面操作系统不同,运行ROS的机器人硬件同时也安装着Linux操作系统,ROS是Linux操作系统上面运行的一个服务。目前,ROS支持多种机器人硬件平台如Willow Garage的PR2、Lego、Nao等。
-

- ROS支持的机器人硬件平台
ROS_RiDE机器人仿真环境
针对ROS中机器人三维仿真环境的功能不完善缺点,实验室开发了一款面向各种服务机器人、教育机器人的三维仿真平台ROS_RiDE,该平台具有跨平台功能可同时运行在Linux、Windows环境中。ROS_RiDE遵循LGPL开源协议,采用面向对象的高性能渲染引擎和高保真的定制物理引擎,并且该仿真环境能够方便的利用ROS中的各种packages、stack等资源,ROS_RiDE对PR2的仿真如下图所示。
-
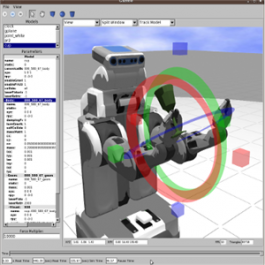
- ROS_RiDE仿真界面

-
- PR2在ROS_RiDE中的仿真
