移动机器人 VSLAM 技术
移动机器人VSLAM技术
移动机器人VSLAM技术是指机器人利用视觉系统实现自主定位与地图创建,是一种非传统的导航技术。随着计算机视觉技术的迅猛发展,基于视觉的机器人定位方法因其信息量大、适应范围广而受到人们的普遍重视,已经成为机器人导航技术的研究热点。当机器人面对复杂的大规模环境,而无法对其进行实时遥控时,机器人必须进行实时地自主定位与地图创建才能完成导航任务。尽管在这一领域已有很多广泛深入的研究,但面对当前在复杂化、非结构化、动态、大规模环境中的SLAM问题依然是个需要突破的科研难题。而基于视觉移动机器人自主定位与地图创建,由于获得环境信息丰富适用性强,而引起研究者广泛关注。
现在主要有如下应用:
1)在未知环境以及危险环境利用机器人实现排障排险工作,需要机器人感知环境信息,进行自主导航;
2)探测器登陆未知环境的星球进行科研研究,探测器面对复杂的大规模环境,而无法对其进行实时遥控时,必须通过实现同步定位与地图创建才能完成导航任务,例如美国“机遇号”、“勇气号”以及“好奇号”等火星探测器;
3)未知海底环境下的水下航行器(AUV)导航技术研究。
4)由于摄像机善于捕捉运动信息,视觉信号抗干扰能力强等优点,可以利用视觉信息实现无人机同步自主导航。如图所示无人机,下方安置摄像机系统,可以利用其采集的视觉信息进行无人机自主定位和导航。
-

- 无人机视觉自主导航系统
从处理技术上讲,移动机器人VSLAM技术属于导航技术领域。为了加强跟踪与定位目标能力,采用具有360度全方位视角的全景视觉VSLAM。移动机器人全景视觉VSLAM首先利用多摄像机全景图像采集系统并结合图像拼接技术得到球形全景图,接着利用SIFT特征提取方法提取特征,利用球形摄像机模型以及多视图几何约束原理恢复三维信息。并且以扩展卡尔曼滤波与粒子滤波方法进行系统的更新,在复杂未知环境下实现机器人的自主定位与地图创建。
部分应用效果图
1)实验装置
本实验室研发的实验装置如下图所示:
-

- 实验室所有移动机器人装置
2)移动机器在未知环境下自主定位导航
图10和图11为移动机器人位置环境下自主定位导航图,其中蓝色的线为机器人运动的轨迹。

-
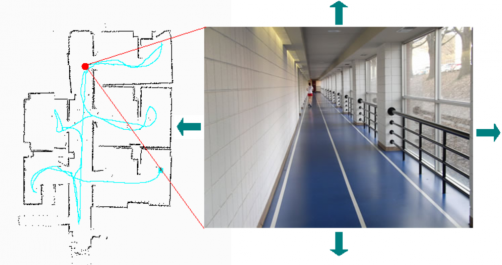
- 移动机器人在某学校办公楼自主导航轨迹图
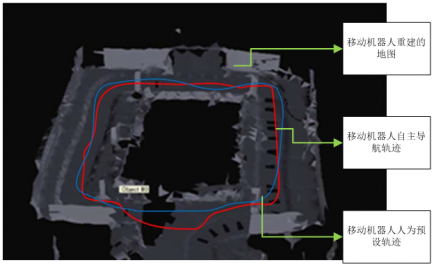
3)自主导航轨迹与人为预设轨迹以及比较移动机器人SLAM地图创建
移动机器自主导航其目的机器人能按照人为预先规定的轨迹移动,比较自主导航轨迹和人为预设轨迹,由图可知他们轨迹几乎吻合。移动机器人SLAM系统除自主定位,还需同步创建地图,其创建的地图如图灰白色部分,其相当于得到移动机器人所处环境的三维模型。