城市级场景三维重建
城市级场景三维重建
所谓城市级场景三维重建,即构建整个城市的三维模型,在数字城市建设、三维地形图绘制、城市国土规划和管理、虚拟旅游、街道空间分析等诸多领域中有着重要的意义。目前城市三维重建主要从两个途径获取图像信息,一个是机载或车载LIDAR(Light Detection And Ranging,激光雷达)数据,一个是航拍图像数据。
基于LIDAR数据的城市三维重建
近几年LIDAR技术的出现,为解决城市三维重建问题提供了新的途径。机载LIDAR主要用于大范围的城市和矿山的表面模型重建,应用比较广泛,但耗费成本比较大;车载LIDAR主要用于城市的高精度建模,成为三维空间信息的快读、有效地获取手段。
-
- 机载LIDAR系统
-

- 车载LIDAR系统
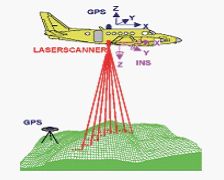
LIDAR技术是一种利用光束来探测物体和测定距离的高科技集成系统,机载GPS提供LIDAR系统的空间位置,惯性测量系统提供LIDAR激光的方向,激光系统提供激光脉冲,计算机系统提供高速、大规模数据存储空间与处理能力,代表着当前数码测绘技术的前沿。
本实验室自主设计了一套用于城市建模的车载LIDAR采集系统,分为室内和室外两套。室内车载LIDAR采集系统由移动机器人、激光传感器、LMS200、差速码盘-陀螺仪组合定位装置、影像采集子系统、上位采集软件平台等构成。室外车载LIDAR采集系统由小型汽车、激光传感器RIEGL-VQ250、差分GPS 卫星定位系统、影像采集子系统、上位采集软件平台等组成。针对采集到的LIDAR数据,提出了以下方法进行了三维模型的构建。
- 采用了基于几何特征和扫描线特征的滤波方法对LIDAR点云进行滤波
- 采用了基于局部平面拟合的方法对点云进行立面点云分割
- 采用了基于单一平面近似的三维重建和基于Delaunay三角网剖分的三维重建方法对立面点集合进行模型构建
-
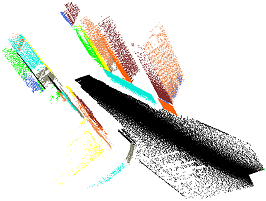
- 车载LIDAR数据立面点云分割效果
-
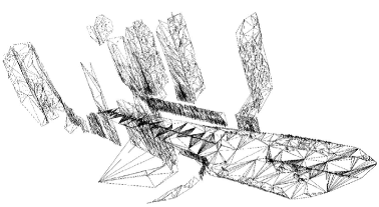
- 车载LIDAR数据的三角网格模型
机载LIDAR获取的数据是分布于对象表面的三维点坐标,其数据集(点云)是对象的数字表面模型(DSM)。由于机载LIDAR能够自动地获取高精度、高密度的地球表面3D坐标信息,已成为生成数字地面模型(DTM)和数字高程模型(DEM)的首选工具。
基于机载LIDAR数据的城市重建主要分为以下四个步骤:首先,通过一种无监督方法把LIDAR输出点云分类。四种类型分别为:地面,建筑物,植物和杂乱区域。第二步,对第一步中分类出得建筑物部分进行提取,提取出诸如平面、圆柱体的几何基元。第三步,获得重建系统的主要元素,让提取出的建筑物几何基元和其他城市中成份在平面地图中排列好。最后,各种城市物体通过模板拟合和建网过程恢复三维结构。
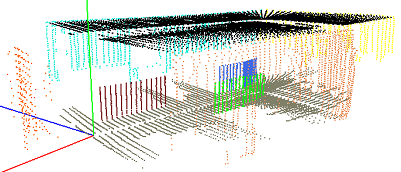
左图为航拍图像右图为对应场景的LIDAR点云,其中绿色部分为地面,蓝色部分为建筑物,红色部分为植被,白色部分为杂乱区域。下图显示了通过对建筑物的提取和与几何基元的匹配最后得到的重建效果。
-
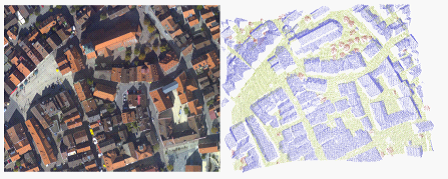
- 左图为航拍图像,右图为LIDAR点云图像
-
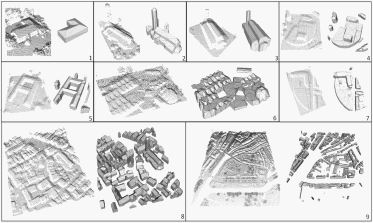
- LIDAR数据重建出的结果
基于LIDAR图像与航拍图像的城市三维重建
航拍是指从空中拍摄地球地貌,获得俯视图。航拍的摄像机可以由摄影师控制,也可以自动拍摄或远程控制。航拍所用的平台包括飞机、直升机、无人机等。航拍图像能够清晰的表现地理形态,因此广泛运用于军事、交通建设、水利工程、生态研究、城市规划等方面。
通过航拍图像自动获取地形三维结构是计算机视觉在对地观测领域的重要应用,其成果对于抗震救灾、城市规划、3D地图导航等领域有着重要意义。在地形生成过程中,系统自动计算稠密的高精度三维空间点云,可以替代传统的数字高程模型(DEM)。
同航空影像提取建筑物相比,基于机载激光雷达测量数据的建筑物识别和提取更加富有挑战性。由于LIDAR数据的不连续性、不规则性及数据的密度不均、缺少地面物体的几何形状和纹理信息等因素,使直接利用LIDAR数据进行城市表面三维信息提取比较复杂,很难大面积、一次性进行建筑物的三维重建。
本实验室结合LIDAR数据和航空影像的纹理与几何信息对城市建筑物和地形信息进行提取和重建进行了研究。将LIDAR数据生成的城市三维模型与航拍图像进行融合,下面分别显示了机载LIDAR生存的城市模型与航拍图像的融合效果和市区模型的贴图效果。
-
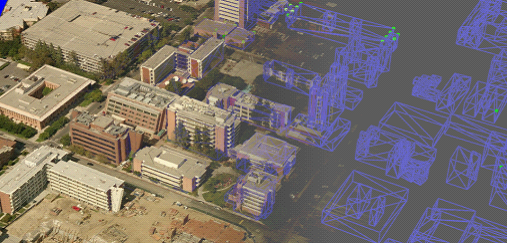
- 机载LIDAR生成城市模型与航拍图像结合效果
-
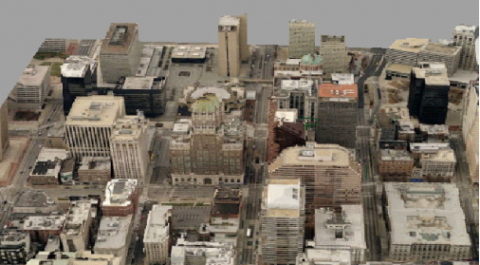
- 市区模型贴图效果